


三维激光扫描仪的工作原理
三维激光扫描仪的工作原理
三维激光扫描仪是一种通过激光技术快速获取物体表面三维空间信息的设备,广泛应用于测
绘、建筑、工业检测、文化遗产保护等领域。其核心原理是通过发射激光束并接收反射信号,
结合精密的时间测量或相位差计算,确定目标点的空间坐标,最终构建高精度的三维点云模
型。

以下是其工作原理的详细解析:
1. 激光测距原理
三维激光扫描仪的核心是测距系统,主要分为以下三种技术:
脉冲式(Time-of-Flight, TOF)
通过计算激光脉冲从发射到反射回接收器的时间差,结合光速计算距离
TOF技术适合长距离测量(如地形测绘),精度可达毫米级,但短距离分辨率较低。
相位差式(Phase-Shift)
对激光束进行幅度调制,通过测量发射波与反射波的相位差计算距离。
三角测距法(Triangulation)
通过激光发射器、接收器(如CCD相机)与目标点构成的三角形几何关系计算距离。适用
于近距离高精度扫描(如逆向工程),但对环境光敏感。

2. 扫描与定位机制
光束偏转系统
激光束通过旋转镜、振镜或多棱镜实现水平和垂直方向的偏转,覆盖待测物体表面。常见
的扫描模式包括线扫描(如旋转激光平面)和面扫描(如Lissajous轨迹)。
多传感器协同
扫描仪内置惯性测量单元(IMU)、GPS(户外用)或编码器(移动平台),结合标靶球
或特征点匹配,将局部点云拼接为全局坐标系下的完整模型。
3. 点云生成与数据处理
数据采集
每秒可捕获数万至百万个点,每个点包含三维坐标和反射强度(Intensity)信息。例如,
地面激光扫描仪(Terrestrial Laser Scanner, TLS)的典型点距为1-5mm@50m。
噪声过滤与配准
通过统计滤波、半径滤波去除离群点,并利用ICP(Iterative Closest Point)算法对齐
多站扫描数据。附加RGB相机还可生成彩色点云。
三维建模
点云经三角化(如Poisson重建)或NURBS曲面拟合,转化为CAD模型或BIM数据。

4. 关键性能参数
精度:受测距误差、角度分辨率(如0.001°)和系统校准影响。
测程:从几厘米(三角法)到数公里(机载LiDAR)。
扫描速率:高速扫描仪可达200万点/秒(如FARO Focus系列)。
5. 应用示例
建筑测绘:通过点云检测墙体变形。
自动驾驶:车载LiDAR实时生成环境三维地图。
考古数字化:高精度记录文物几何细节。
三维激光扫描仪通过激光测距与动态扫描的结合,实现了高效、非接触式的三维数据采集。
其技术选型需权衡测程、精度和场景需求,而后续的点云处理能力直接决定了最终模型的
可用性。随着SLAM(即时定位与地图构建)技术的发展,便携式扫描仪正推动三维数字
化迈向实时化与智能化。
南京环球测绘仪器公司提供各品牌三维激光扫描仪,比如:徕卡三维激光扫描仪,
其域三维激光扫描仪,科力达三维激光扫描仪等,也承接测绘培训与各种内外业工程
测量测绘任务。有相关的需要了解都可以联系或者咨询我们,我们将详细为你解答。
更多相关

默默付出的测绘人
李春霖 在荒无人烟的戈壁沙漠,总要有人,去那遥远地带测天量地; 在生命禁区的世界之巅,总要有人,将那生命禁区精确丈量; 在冰雪覆盖的南极海岸,总要有人,来填补大片的测绘空白; 在旖旎风情的...

徕卡BLK360如何助力装修行业?
徕卡BLK360三维激光扫描仪如何助力装修行业?在装修行业中,精准的空间数据采集、高效的施工管理以及精细化的设计规划至关重要。徕卡BLK360作为一款便携式高精度三维激光扫描仪,凭借其快速扫描、高精度...
山西省第五届测绘地理信息职业技能竞赛闭幕
6月28日至29日,由山西省测绘地理信息局举办的第五届全国测绘地理信息行业职业技能竞赛山西选拔赛在太原举行。山西省测绘地理信息局党组成员、副局长孔令礼出席开、闭幕式。 本届竞赛分工程测量和地...

徕卡助力冬奥 3D压雪让场地更精准 更高效 更智能
万众瞩目的2022北京冬奥会即将开幕,各国运动员将在这里进行精彩绝伦的表演,展现自己的精彩。其中云顶滑雪公园赛场,有自由式滑雪空中技巧、雪上技巧、U型场地、坡面障碍技巧、单板平行大回转、障碍追逐6...
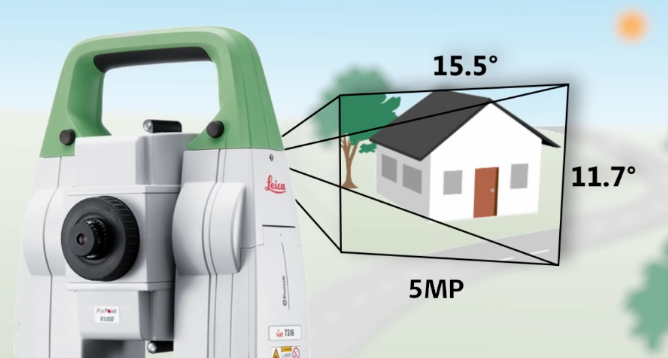
徕卡-如何让全站仪1秒钟采集500万个数据?
1977年6月,WILD公司在国际测量师协会(FIG)会议上,首次对发布全站式电子速测仪TC1,从此外业“打点”,内业“连图”的模式开始在大比例尺测绘中普及。 直到当今,全站仪作为百米量级上最高...
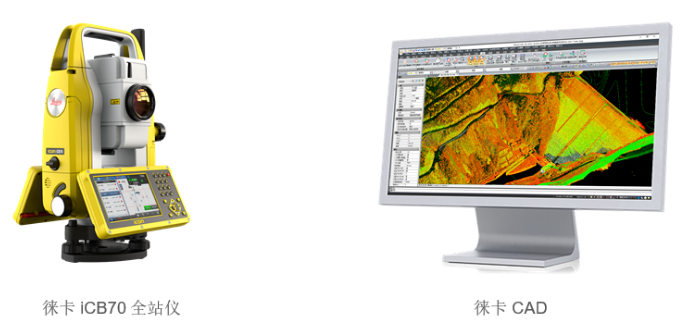
徕卡iCB70全站仪结合徕卡CAD在竣工测量中的应用
一、竣工测量的需求竣工测量是指各种工程建设竣工、验收时所进行的测绘工作。竣工测量的最终成果就是竣工总平面图,它包括反映工程竣工时的地形现状、地上与地下各种建筑物以及各类管线平面位置与高程的总现状地形图...

使用GPS测量仪的注意事项,适合新手学习
土地面积测量仪又称 GPS测量仪。在以前,农业机工作收费或土地测量都用简单的拉线或皮尺作为测量工具,可以测量小块土地和规则形状的土地,但当遇到不规则的土地或面积大的地块时,皮尺或拉线都明显...

垂准仪是什么?如何使用激光垂准仪
垂准仪是什么?如何使用激光垂准仪在建筑、工程、地理和测绘等多个领域,垂准仪是一种不可或缺的精密测量工具。它以其精准度高、操作简便的特点,成为了现代测量技术中的一颗璀璨明珠。垂准仪的基本构造主要包括一个...
 环球测绘微信
环球测绘微信