


沉降观测步骤详细讲解,高精度水准测量流程
沉降观测即根据建筑物设置的观测点与固定(永久性水准点)的测点进行观测,测其沉降程度用数据表达,凡一层以上建筑、构筑物设计均要求设置观测点。既然沉降观测这么重要,今天就为大家带来一期沉降观测详细步骤解读,希望对您的工作及学习带来一定帮助。

沉降观测的详细步骤↓
仪器
仪器应使用高精度电子水准仪,避免人工读数误差;水准尺应使用受环境及温差变化影响小的高精度铟钢条码尺。在不具备铟钢条码尺的情况下,使用一般塔尺时应尽量使用第一段标尺。
观测时间
相邻的两次时间间隔称为一个观测周期,都必须按施测方案中规定的观测周期准时进行。
观测点的设置
沉降观测点要埋设在最能反映建(构)物沉降特征且便于观测的位置。相邻点之间间距以15-30 m为宜,均匀地分布在建筑物的周围(埋设的沉降观测点要符合各施工阶段的观测要求,特别要考虑到装修装饰阶段因墙或柱饰面施工而破坏或掩盖住观测点)。
沉降观测的五定
所谓“五定”,即通常所说的沉降观测依据的基准点、工作基点和被观测物上的沉降观测点,点位要稳定;所用仪器、设备要稳定;观测人员要稳定;观测时的环境条件基本上要一致;观测路线、镜位、程序和方法要固定。
观测过程中,步步有校核
①前后视距≤30 m,前后视距差≤1.0m,
②沉降观测点相对于后视点的高差容差应≤1.0mm,
建立固定的观测路线
在控制点与沉降观测点之间建立固定的观测路线,并在架设仪器站点与转点处做好标记桩,保证各次观测均沿统一路线。
埋入墙体的观测点
材料应采用直径不小于12毫米的元钢,一般埋人深度不小于12厘米,钢筋外端要有90°弯钩弯上,并稍离墙体,以便于置尺测量。
框架结构的观测
框架结构的建筑物每二层观测一次,竣工后再观测一次。
水准点
水准点是对各观测点沉降的基准点,一定要选定相对固定的稳定的其他建筑物等适当部位,一般不少于2个。
现场观察方法
每次观察均需采用环形闭合方法,当场进行检查,同一观测点的两次观测之差不得大于1毫米。
绘制记录沉降图
完成沉降观测工作,要先绘制好沉降观测示意图并对每次沉降观测认真做好记录。
(1)沉降观测示意图应画出建筑物的底层平面示意图,注明观测点的位置和编号,注明水准基点的位置、编号和标高及水准点与建筑物的距离。并在图上注明观测点所用材料、埋入墙体深度、离开墙体的距离。
(2)沉降观测的记录应采用建设部制定的统一表格。观测的数据必须经过严格核对无误,方可记录,不得任意更改。当各观测点第一次观测时,标高相同时要如实填写,其沉降量为零。以后每次的沉降量为本次标高与前次标高之差,累计沉降量则为各观测点本次标高与第一次标高之差。
沉降观测点的设置
如建筑物四角,沉降缝两侧,荷载有变化的部位。
停工时和复工时进行观测
如中途停工时间较长,应在停工时和复工时进行观测。筑物封顶或竣工后,一般每月观测一次,如果沉降速度减缓,可改为2~3个月观测一次,直至沉降稳定为止。
观测方法
观测时先后视水准基点,接着依次前视各沉降观测点,最后再次后视该水准基点,两次后视读数之差不应超过±1mm。另外,沉降观测的水准路线(从一个水准基点到另一个水准基点)应为闭合水准路线。
精度要求
沉降观测的精度应根据建筑物的性质而定。
1)多层建筑物的沉降观测,用普通水准测量的方法进行,其水准路线的闭合差不应超过 ±2.0 ×n 的开方mm(n测站数)。
2)高层建筑物的沉降观测,用二等水准测量的方法进行,其水准路线的闭合差不应超过 ±1.0×n 的开方mm(n为测站数)。
工作要求
沉降观测是一项长期、连续的工作,为了保证观测成果的正确性,应尽可能做到四定,即固定观测人员,使用固定的水准仪和水准尺,使用固定的水准基点,按固定的实测路线和测站进行。
沉降观测的成果整理
(1)整理原始记录 每次观测结束后,应检查记录的数据和计算是否正确,精度是否合格,然后调整高差闭合差,推算出各沉降观测点的高程,并填入“沉降观测表”中。
(2)计算沉降量 计算内容和方法如下:
1)计算各沉降观测点的本次沉降量:
沉降观测点的本次沉降量=本次观测所得的高程-上次观测所得的高程
2)计算累积沉降量:
累积沉降量=本次沉降量+上次累积沉降量将计算出的沉降观测点本次沉降量、累积沉降量和观测日期、荷载情况等记入“沉降观测表”中。
绘制沉降曲线为沉降曲线图
沉降曲线分为两部分,即时间与沉降量关系曲线和时间与荷载关系曲线。
1)绘制时间与沉降量关系曲线 首先,以沉降量s为纵轴,以时间t为横轴,组成直角坐标系。然后,以每次累积沉降量为纵坐标,以每次观测日期为横坐标,标出沉降观测点的位置。最后,用曲线将标出的各点连接起来,并在曲线的一端注明沉降观测点号码,这样就绘制出了时间与沉降量关系曲线。
2)绘制时间与荷载关系曲线 首先,以荷载为纵轴,以时间为横轴,组成直角坐标系。再根据每次观测时间和相应的荷载标出各点,将各点连接起来,即可绘制出时间与荷载关系曲线。
更多相关
卫星导航立法严重滞后-建设“法治北斗”为当下之急
北斗卫星导航系统作为国家重大时空基础设施,是军民融合的典型工程,涉及国家安全以及经济社会建设的方方面面,关系到国内国外“千家万户”的种种利益,必然要求运用法治思维和法治方式进行建设。 近日,卫星...

如何使用RTK测量两个未知点之间的空间距离?
如何使用RTK测量两个未知点之间的空间距离?使用RTK测量两个未知点之间的空间距离通常涉及以下步骤:1.设备准备:-准备一台配备了RTK功能的GPS接收器,例如无人机、地面接收机或车辆上的接收机。...
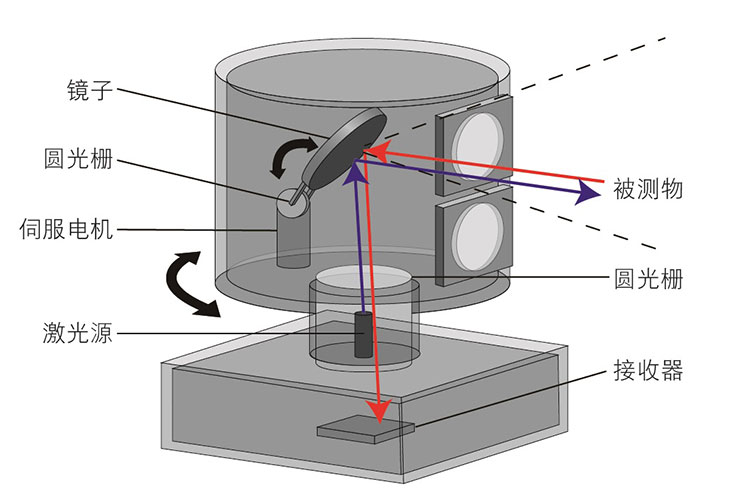
三维激光扫描仪的工作原理
三维激光扫描仪的工作原理三维激光扫描仪是一种通过激光技术快速获取物体表面三维空间信息的设备,广泛应用于测绘、建筑、工业检测、文化遗产保护等领域。其核心原理是通过发射激光束并接收反射信号,结合精密的时间...

gps测量仪的工作原理
1.GPS测量原理。GPS测量仪接收到三个或三个以上导航卫星信号时,可以计算出测量仪(GPS接收器)所在的坐标的位置。接收到4个或4个以上卫星信号时,就可以计算出海拔高度。2.GPS全球定位系统分为...

智能经纬罗盘仪DQL-Z1
智能经纬罗盘仪测量功能包括:方位角、俯仰角、斜距、水平距、高差磁偏角设置,修正“磁北”到“真北”粗瞄与光学瞄准相结合,更容易锁定目标脉冲式激光测距,反应快速、准确支持磁偏角、样地名称、实时时间、屏幕亮...
天账号难求?带你了解_中国移动cors账号
移动CORS账号,也叫中国移动"OnePoint"高精度定位产品,是中国移动依托全国站址资源优势,建设的一张全球站点规模大、选址优、制式新的高精度定位网,可在除港、澳、台及少数无人...
2021年一直在改变的千寻
2021年已然过去,大家对RTK的追求还是固定快?强搜星?信号好?抗干扰?精度高?更稳定? 当然,这些都很重要,重要到已成为门槛级的基础能力。但...

千寻星河S1便携式无人测量船 新品发布
千寻星河S1便携式无人测量船:水域测绘的智能革新者千寻星河S1便携式无人测量船是千寻位置网络有限公司推出的一款集高精度定位、智能控制与便携设计于一体的小型化无人水上测量平台。它代表了当前水域测绘领域向...
 环球测绘微信
环球测绘微信