


图文介绍几种全站仪测量方法
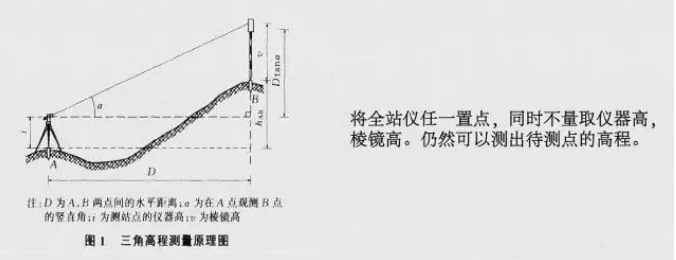
高程测量
1、仪器任意置点,但所选点位要求能和已知高程点通视。
2、用全站仪照准已知高程点,测出V的值,并算出W的值。(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值,施测前不必设定。)
3、将仪器测站点高程重新设定为W,仪器高和棱镜高设为0即可。
4、照准待测点测出其高程。
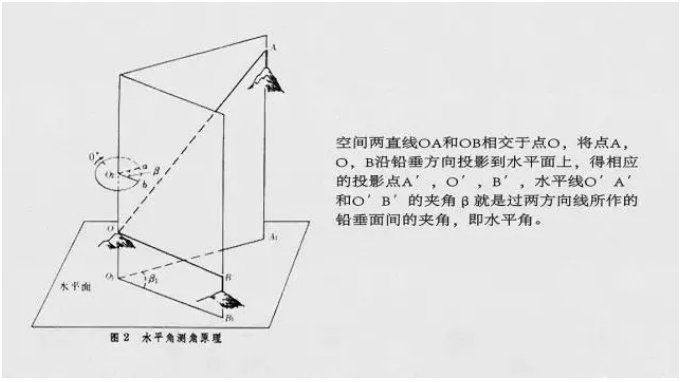
水平角测量
1、按角度测量键,使全站仪处于角度测量模式,照准第一个目标。
2、设置A方向的水平度盘度数为0°00´00"。
3、照准第二个目标B,此时显示的水平度盘度数即为两方向的水平夹角。
4、用于测量水平角的仪器,必须具备一个能置于水平位置水平度盘,且水平度盘的中心位于水平角顶点的铅垂线上。
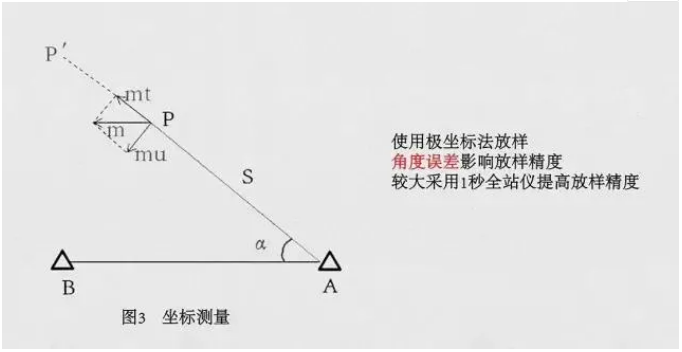
坐标测量
1、设定测站点的三维坐标。
2、设定后视点的坐标或设定后视方向的水平度盘读数为其方位角。当设定后视点的坐标时,全站仪会自动计算后视方向的方位角,并设定后视方向的水平度盘读数为其方位角。
3、设置棱镜常数。
4、设置大气改正值或气温、气压值。
5、量仪器高、棱镜高并输入全站仪。
6、照准目标棱镜,按坐标测量键,全站仪开始测距并计算显示测点的三维坐标。
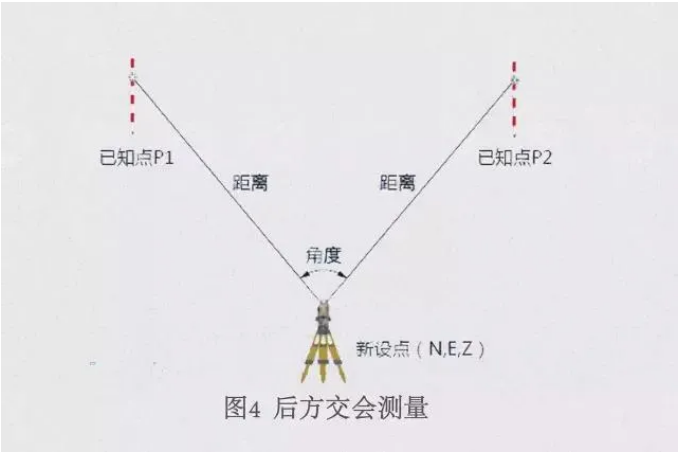
后交会测量
722R4L全站仪安置在某一待定点上,通过对两个以上的已知点处棱镜进行观测,并输入各已知点三维坐标及仪器高和棱镜高后,全站仪即可显示待定点的三维坐标。
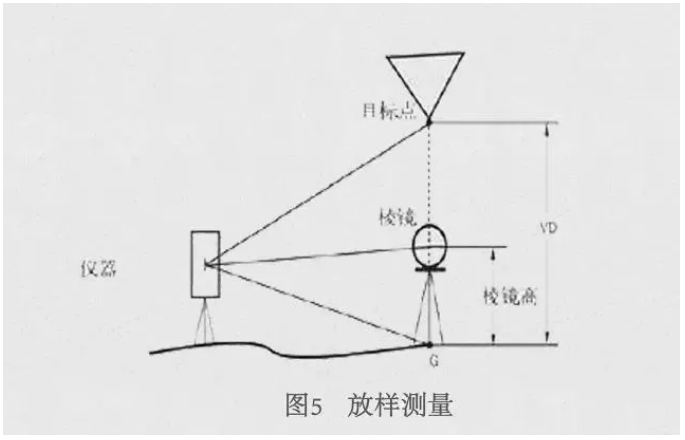
放样测量
1、将要测设的角度和边长(或坐标值)输入全站仪。
2、在放样过程中仪器显示角度和边长的实测值与放样值之差,根据显示的偏离值及符号调整棱镜位置,直至偏离值为零,此时棱镜所处位置即为要测设的点位。
4、有的电子全站仪还可通过图形显示棱镜上下左右前后的移动方向。
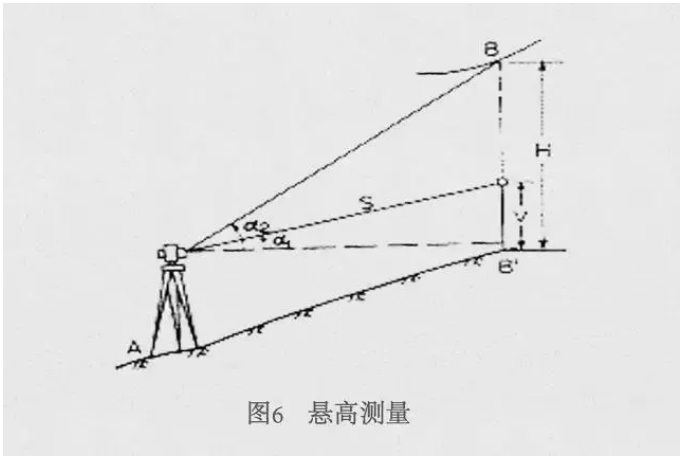
悬高测量
1、要测量某些不能设置反射棱镜目标(高压电线、桥梁桁架)的高度时,可在目标正上方或正下方处安置棱镜,输入棱镜高V。
2、瞄准棱镜并观测后,在瞄准目标,仪器即可显示目标的高度H。
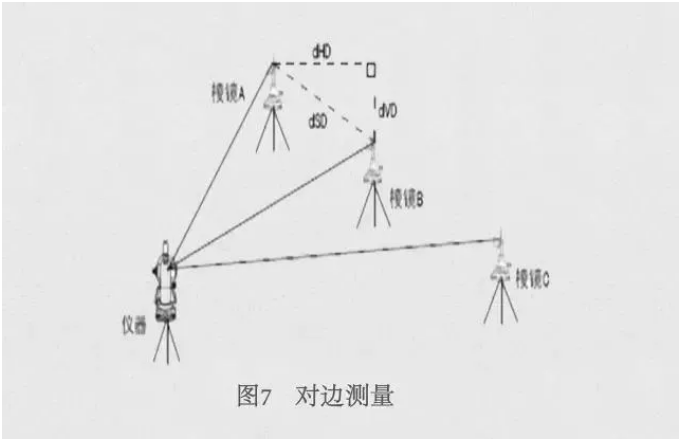
对边测量
如图:分别瞄准两个目标点处的棱镜并观测后,仪器即可显示出两个棱镜之间平距(dHD)、斜距(dSD)、高差(dVD)。
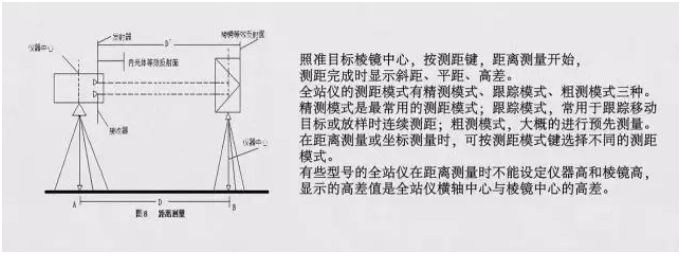
距离测量
1、首先设置全站仪棱镜常数。
测距前须将棱镜常数输入全站仪中,仪器会自动对所测距离进行改正。
2、其次,设置全站仪的大气改正值或气温、气压值。
光在大气中的传播速度会随大气的温度和气压而变化,15℃和760mmHg是仪器设置的一个标准值,此时的大气改正为0ppm。实测时,输入温度和气压值,全站仪会自动计算大气改正值,并对测距结果进行改正。
3、接着,量仪器高、棱镜高并输入全站仪。
4、最后,全站仪距离测量。
更多相关

陕西省北斗卫星导航定位基准站系统(CORS)与邻省实现数据共享
为积极响应国家关于“一带一路”倡议,提升陕西省与邻省交界地区的卫星导航定位系统服务能力,自然资源部下属陕西测绘地理信息局建成陕西省北斗卫星导航定位系统,日前,该系统与邻省及相关部门基准站实现数据共享...

RTK测量仪器助力青岛考古所及平度市博物馆进行考古发掘
近日从青岛平度市博物馆获悉,平度市小光顶墓地出土的彩绘车马出行俑,是青岛乃至胶东半岛地区首次发现的彩绘“兵马俑”。 彩绘“兵马俑”出土场景资料图片 青岛平度市古岘镇八里庄村东北方向有一片岭地...

其域灵视P1:开启数字化新纪元的3D空间相机
灵视P1是由其域创新研发的革命性3D空间相机,被誉为"真空间相机"。这款设备融合了SLAM(同步定位与地图构建)与3D高斯泼溅(3DGS)...

中国测绘学会2019学术年会成功举办
10月16日,以“创新融合 智绘未来——测绘服务生态文明建设”为主题的中国测绘学会2019学术年会在江苏南京国际展览中心举行。这是一场学会建会60周年的盛会,全国政协副主席何维、自然资...
徕卡3D Disto在汽车传感器定位校准中的应用
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。汽车自动驾驶技术包括视频摄像头、雷达传感器以及激光测距器来了解周...

千寻CORS账号如何购买划算? 选南京环球测绘
千寻CORS账号如何购买划算? 选南京环球测绘南京环球测绘仪器有限公司为:“千寻CORS账号”全国代理商,代理商对比官网的优势在于可以提供实时的技术服务支持,有专业的技术部门,24小时处理...

徕卡RTC360三维激光扫描仪不动产权籍调绘方案
一、背景 第三次全国国土调查(简称三调)的初步成果已经基本完成,目前已进入数据核实、整改、补充、举证、完善阶段。不动产权籍调查是三调的主要任务,也是不动产登记的前提和基础,事关老百姓的核心权益。...
昆山市城建测绘有限公司工程测量部工作纪实
昆山市城建测绘有限公司是一家具有工程测量、不动产测绘、地理信息系统工程及海洋测量乙级资质的专业测绘机构。自公司成立至今,工程测量部的每一位测绘人一直坚持宁可自己多流汗也不让数据出差错的原则,每...
 环球测绘微信
环球测绘微信